底盘学会预判,但方向盘仍然需要一条“退路”

一辆MPV如何实现Mini Cooper的转弯半径?
21世纪经济报道记者 焦文娟
车身晃,车头点,过减速带后排自然会颠起来,是多数人对大型SUV的直接印象。
一台整备质量接近3吨的车,加速和刹车时的俯仰、过弯时的侧倾都会被自重放大。后排乘客坐得离车轮远,对晃动的感知更敏感。这是因为传统悬架调校本质上是在做“事后过滤”,路面输入已经发生了,弹簧和减振器再被动响应。
这不仅关乎调校功力,更多是物理结构决定的困局。传统底盘依赖机械连接,即转向机通过拉杆连前轮,刹车踏板与卡钳之间有液压管路,油门有拉线。信号传递有物理延迟,响应路径固定,无法根据路况实时调整。
但现在的新车都在试图规避这种颠簸。2025年下半年开始,理想、问界、尊界等品牌相继将底盘技术作为新车的核心卖点。理想MEGA的“魔毯空气悬架3.0”、问界M9的“途灵底盘”、尊界S800的“途灵Ⅱ龙行底盘”,这些频繁亮相的底盘技术有一个共同基础:全线控底盘。
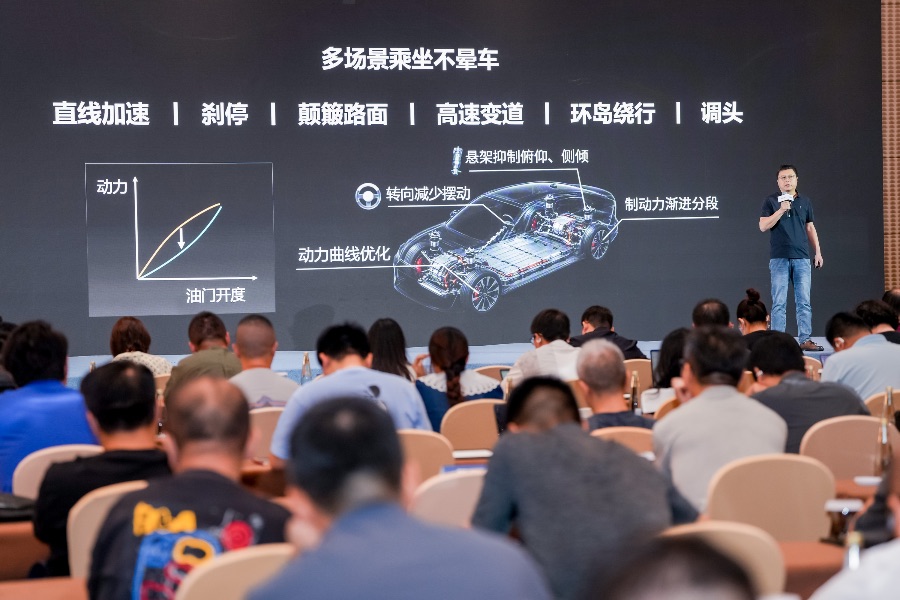
(鸿蒙智行技术日,图源鸿蒙智行)
线控底盘用电子信号替代机械和液压连接。方向盘不再通过转向机和拉杆与前轮刚性连接,刹车踏板与卡钳之间取消了液压管路,油门不再有拉线。传感器采集驾驶员的操作或系统决策指令,转化为电信号传递给ECU,经算法处理后驱动执行机构完成动作。
底盘不再是一个等待物理输入再做出响应的机械系统,而是在车辆到达路面异常点之前就已经完成了识别、计算和指令下发。这是数字底盘与传统底盘的分界点。
2026年7月1日,一项改写底盘技术规则的新国标正式生效,《汽车转向系基本要求》(GB 17675-2025)全面落地实施。新规最核心的变化,是删除了“方向盘与车轮之间必须有机械连接”的强制要求。这意味着方向盘和车轮可以“脱钩”,线控转向已经有标准可依。
丢掉机械连接后,汽车底盘如何给自己留后路
一辆行驶中的汽车,底盘每秒处理数百个路况信息,执行数次车身姿态调整,而驾驶舱里的人几乎察觉不到。更好的底盘技术,恰恰是让人忘记底盘的存在。但这种“遗忘”背后,是驾驶者把最后的手感判断,交给了看不见的比特流。
今年以来,线控底盘的热度远超以往。它的工作流程被清晰地分为三层:
·在感知层,毫米波雷达、激光雷达、高清摄像头、组合惯导提前扫描前方路面,识别减速带、坑洼、井盖。
·在规划决策层,底盘域控制器或智驾芯片接收感知数据,经算法处理后生成控制指令。比如理想把底盘控制与辅助驾驶部署在同一颗自研芯片上,芯片内通信延迟控制在1毫秒以内。华为数字底盘引擎实现6合1智能协同控制,最小决策链路时延低至1毫秒。
·在执行层,则是线控转向、线控制动、线控悬架的执行器接收指令并完成动作,比如采埃孚sMOTION主动悬架可在0.5秒内主动调整车身高度。
这套体系解决了传统机械底盘长期存在的“信息孤岛”问题。燃油车时代,悬架只负责滤振,转向只传递角度,制动只建压减速,三者之间没有数据互通,更不会提前预知路面变化。碾过坑洼后车身开始晃动,悬架才被动吸收能量,驾驶者永远慢半拍。线控底盘让转向、制动、悬架共享同一份路况数据,协同预判、同步调整,能把“被动反应”变成了“主动准备”。
华为途灵平台走的是一条系统化的路径。鸿蒙智行底盘工程师向21世纪经济报道记者拆解了其中的技术逻辑:物理层面,把前轮最大转角做到了42度以上;控制层面,通过扭矩矢量分配让外侧车轮比内侧车轮转得更快,利用轮速差辅助转弯;悬架层面,转弯时主动收紧外侧阻尼,抑制侧倾。加上后轮转向后,尊界S800车长5.48米,转弯半径压到5.05米,比轴距2.52米的Mini Cooper还小。
但电子化带来的便利,也伴随着新的工程挑战。方向盘与车轮之间没有物理连接,刹车踏板与制动器之间只有电信号,这意味着一旦低压供电中断、通信丢失或芯片异常,驾驶者将失去直接操控的能力。
安全冗余因此被提到前所未有的高度。
电源冗余方面,多家车企在底盘域控制器中集成超级电容或独立备用锂电池,确保主电源失效后转向和制动仍能维持数次操作。通信冗余方面,关键信号采用双路CAN或车载以太网环形拓扑,一条链路中断另一条即时接管。
最直接的仍然是机械备份。采埃孚在新一代线控转向中保留机械转向柱离合装置,正常断开,紧急时自动啮合,让方向盘重新建立物理连接。
一位鸿蒙智行的底盘工程师向记者表示,华为途灵底盘采用的是区域控制器加中央计算架构。在线控转向方案中,系统配备了两个区域控制器同时工作,将线控功能集成整合到数据控制器中。为了实现主动防阻,系统进行了冗余设计,当其中一个区域控制器出现通信或计算失效时,系统会自动切换到另一个区域控制器。
“这相当于给底盘装了两个大脑。在此基础上还有第三重冗余,即上下转向系统之间也保留了一条直接通信链路,通过周期性报文监控两个控制器的健康状态。如果主控和备控都失效,上下转向系统就直接通过这条链路通信,绕过控制器直接控制转向器。”上述工程师说。
目前最新的强制性国家标准已对线控底盘的冗余提出明确指引,要求线控转向系统内部至少具有双重通信、双重供能的全冗余架构,并强化了对全动力转向系统的供电要求。
线控底盘,L3 的物理底座
当底盘摆脱机械联动束缚、依靠多重冗余筑牢安全底线,一套可预判、可协同、可兜底的整车控制体系就此成型。而这套体系,正是 L3 自动驾驶落地的硬性前置条件。有了线控底盘,L3 才有了从法规定义走向实际运营的物理基础。
底盘技术的电子化是不可逆的浪潮,它让汽车变得更聪明、更平顺,也更节能。2026年被业内公认为线控转向元年。蔚来ET9成为中国首款量产线控转向车型,智己LS9全系标配全线控四轮转向。据盖世汽车研究院预测,2026年中国乘用车线控底盘核心市场规模将达650亿元,年复合增长率35.4%。
线控底盘对于L3而言,是基础设施而非配套升级。传统机械转向依靠转向柱传递扭矩,响应延迟由物理结构决定。线控转向将指令转化为电信号直接传输,响应时间压缩至毫秒级,同时线控制动响应时间从数百毫秒缩短至数十毫秒。高速紧急避障中,执行层每毫秒延迟都对应制动距离的实质增加,智驾系统的决策价值受限于执行系统的响应带宽。
L3对功能安全提出ASIL-D等级要求,即任意单点失效不得导致转向或制动功能丧失。传统机械转向靠转向柱物理连接提供一级备份,线控转向取消了这根柱子,必须用电子和硬件手段重构冗余。
比如蔚来ET9在线控转向上做了供电、通信、硬件、软件四重冗余,系统失去转向能力的概率仅为4.5FIT,即10亿小时失效4.5次,可靠性较传统电动助力转向提升2.2倍。
线控转向取消了方向盘与车轮的机械连接,方向盘不再必须随车轮转动。更重要的是,智驾系统得以直接控制车轮转角,无需经过机械连杆的中间转换。这种解耦为自动驾驶控制算法提供了直接执行通道,消除了机械结构带来的控制误差与延迟。
一位智驾工程师告诉记者,线控转向的解耦特性在L4级“人车共驾”阶段能够规避人类驾驶员与智驾系统对转向执行权的潜在冲突,方向盘可收折、无硬连接,避免误干预。
途灵平台的技术储备并非针对当前市场。鸿蒙智行的底盘工程师透露,其硬件架构预留了充足带宽,用于L3/L4级自动驾驶落地后的控制需求,其功能投放节奏取决于政策进展。
但商业化窗口并不宽松。一位汽车行业分析师告诉记者,完整智能底盘方案目前普遍搭载于50万元以上车型,但线控转向技术本身已开始下探。其中成本是最大的拦路虎,一套完整的线控转向冗余方案,双电源、双通信、机械备份离合叠加,导致单车成本显著增加。
成本之外,供应链成熟度是另一道坎。线控底盘的核心部件,比如线控转向电机、EMB卡钳、高精度轮速传感器等,目前仍高度依赖外资供应商。采埃孚为蔚来ET9提供核心线控转向技术,并已获得梅赛德斯-奔驰订单,2026年欧洲将启动首批线控转向车辆量产。
国产替代方案在可靠性与产能方面仍有差距,但2026年新国标实施被视为国产替代的关键窗口期。据开源证券分析,线控转向与线控制动门槛高、内外资差距收窄、渗透率低,国产供应商或大有可为。
不过,当一辆车可以在100毫秒内调整悬架硬度,在1毫秒内完成决策通信,它同样应该在主电源断开的瞬间,给驾驶者留一个能拧动的方向盘,一脚能踩实的刹车踏板。
(作者:焦文娟 编辑:吴晓宇,张明艳)
南方财经全媒体集团及其客户端所刊载内容的知识产权均属其旗下媒体。未经书面授权,任何人不得以任何方式使用。详情或获取授权信息请点击此处。